Towards more data-efficient task-agnostic exoskeleton controller
Accurate estimation of biological joint moments is essential for volitional exoskeleton control.
However, training these estimators typically requires large, diverse datasets collected across dozens of locomotor tasks, which is time‑consuming and expensive. Reducing the number of required tasks without sacrificing performance remains an open challenge.
Here, we propose grouping locomotor tasks using biomechanical features and selecting only representative tasks to train a task-agnostic model.
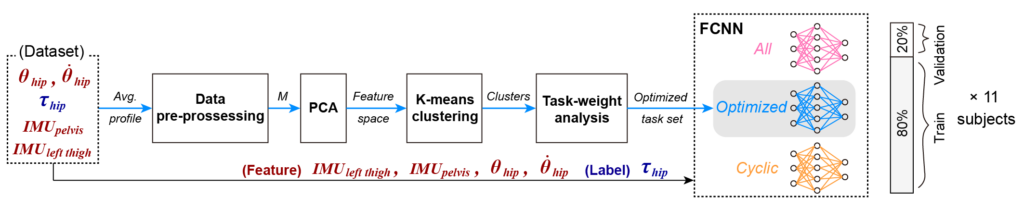
Data Collection & Preprocessing
Utilized an open-source dataset of IMU, joint kinematics, and kinetics from 11 subjects performing 20 tasks.
Extracted biomechanical features and standardized across trials.
Dimensionality Reduction (PCA)
The latent space of locomotor tasks is generated as below.
Retained three principal components explaining 70% of the variance.
Clustering (K‑means)
Determined optimal cluster count (K = 8) via silhouette analysis.
Grouped the locomotor task data points into 8 clusters.
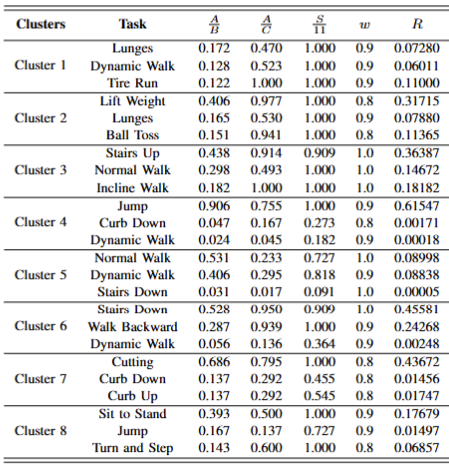
Task‑Weight Analysis
Computed representativeness score for each task in its cluster.
The most representative task from each cluster was chosen as the optimized task set.
Model Training & Validation
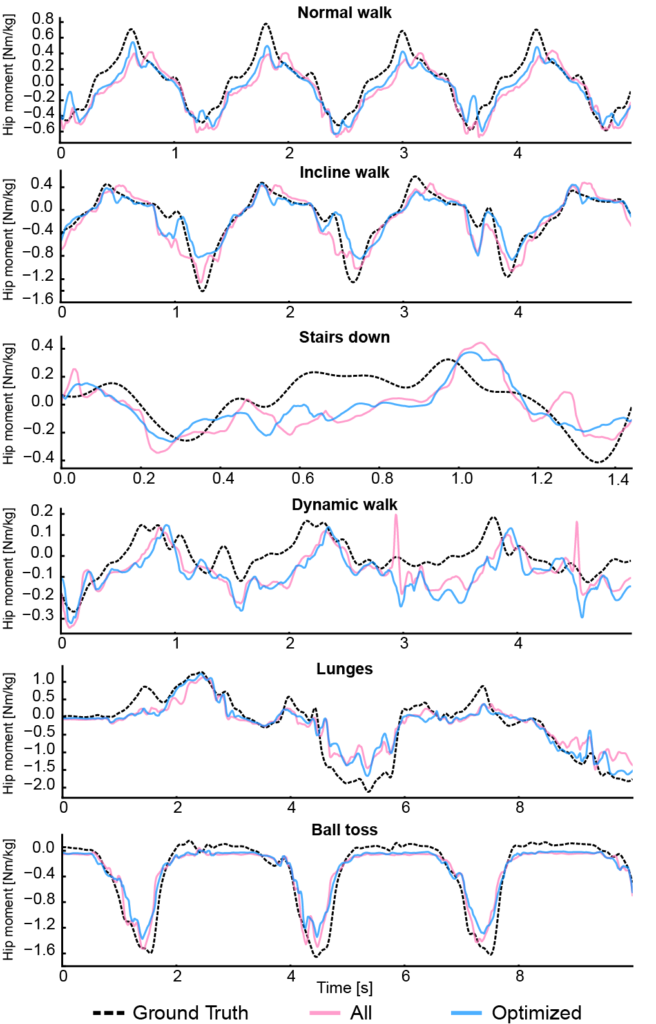
Trained a fully connected neural network on all, optimized, and cyclic tasks.
Evaluated on held‑out tasks to compare RMSE and R2.
Clustering the tasks revealed interpretable similarities such as cyclic or non‑cyclic and ascending or descending, thereby enabling more informative comparisons across tasks.
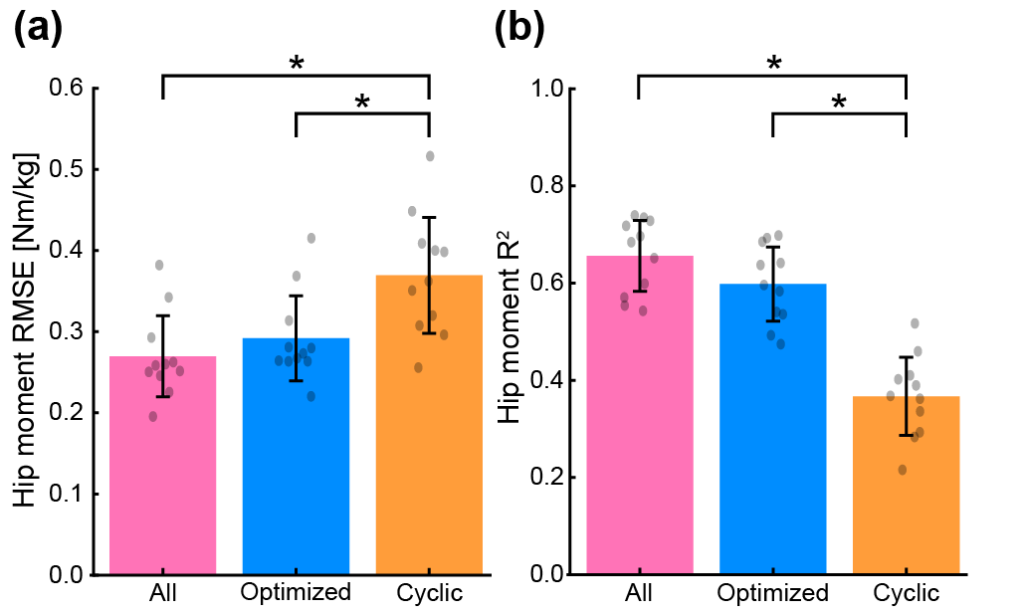
The optimized model achieved comparable estimation to the model trained on data from all the tasks and significantly outperformed the model trained only on cyclic tasks, resulting in 20% less error. Training on the optimized task set versus on all tasks yielded nearly identical estimation; both models succeeded and struggled on the same tasks.
Takeaway
Based on their underlying biomechanical features, distinct locomotor tasks can be effectively mapped into a latent space and grouped into clusters.
Without requiring extensive data collection and training, deep learning models are capable of capturing inter-task similarities and performing well in a task-agnostic manner.