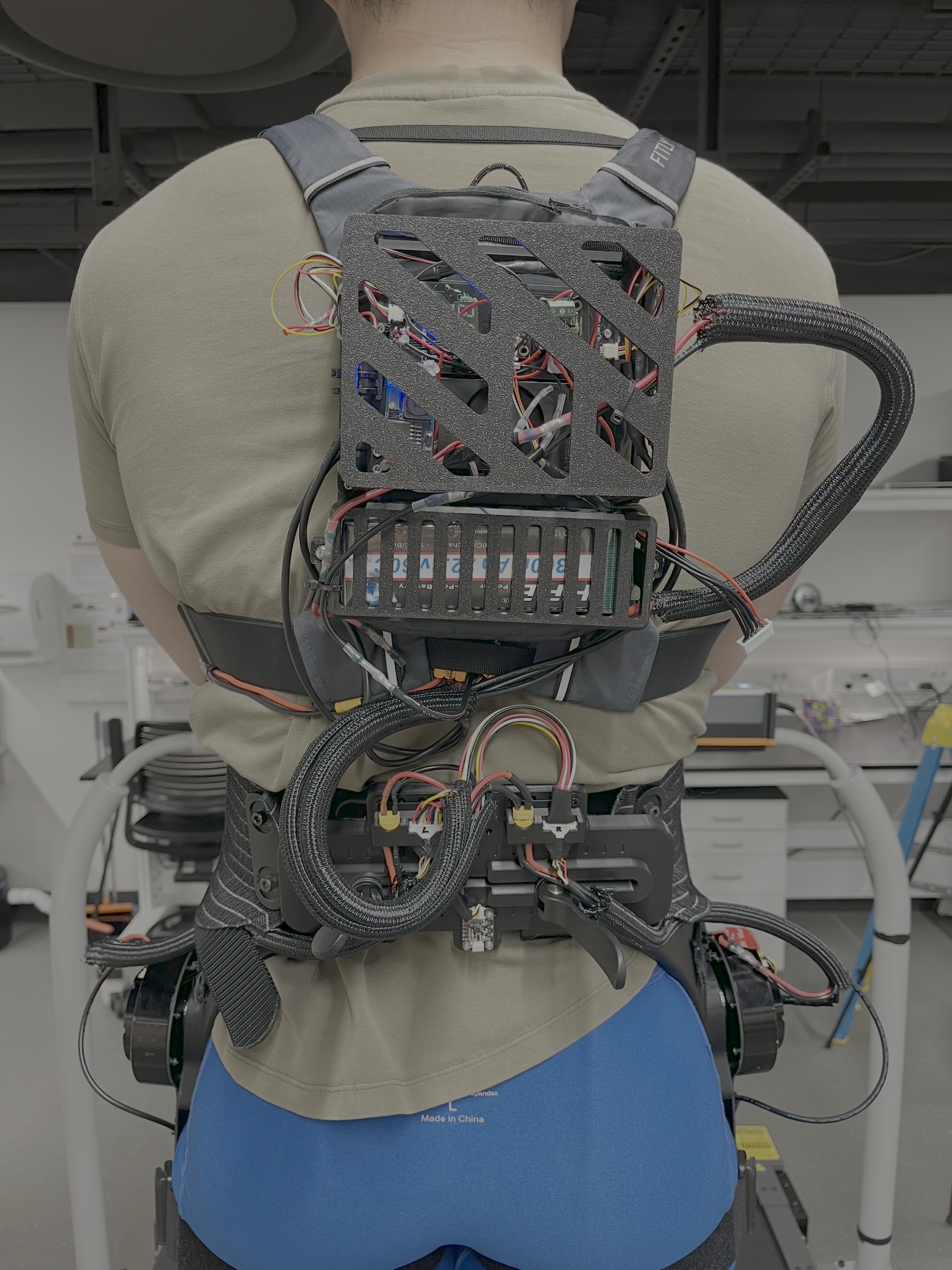
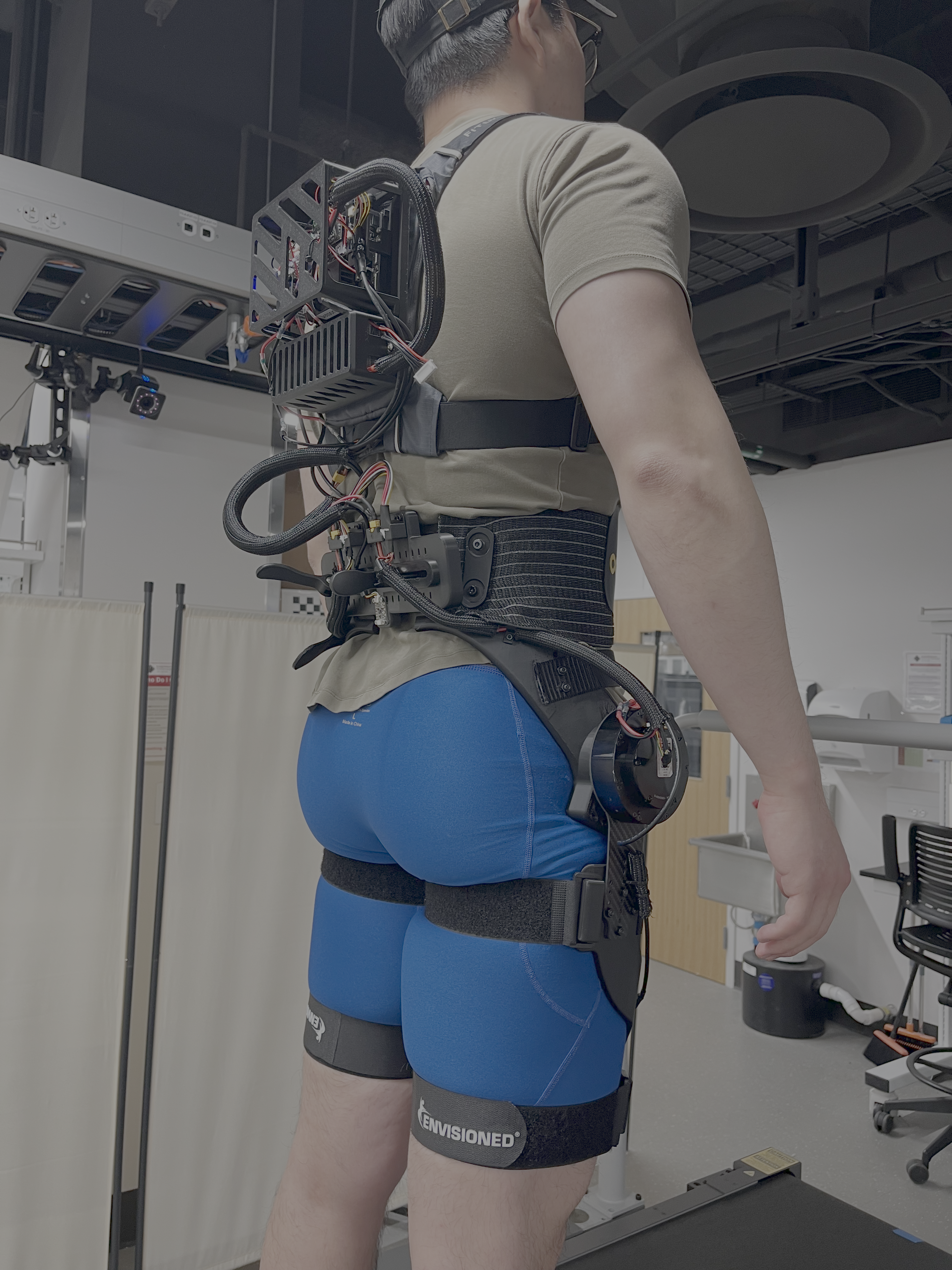
Design and control validation of a robotic hip exoskeleton
Combining expertise from biomechanics, robotics, and control engineering, our team is focused on creating a highly adaptable device capable of responding to real-time user inputs and dynamic locomotor tasks. Their work is centered on integrating advanced sensors and actuators that ensure precise, natural movement while minimizing energy consumption. With an emphasis on both wearability and user comfort, the exoskeleton is being engineered to fit a wide range of individuals, providing vital insights into its application for both clinical and research environments. In parallel, the team is developing sophisticated control algorithms that incorporate machine learning techniques and real-time feedback, pushing the boundaries of assistive technology. This dual focus on hardware and controller development aims to not only improve the performance of hip exoskeletons but also pave the way for future breakthroughs in robotic rehabilitation and mobility enhancement.